我们很高兴与您分享与2023年在IEEE Transactions on Medical Imaging(JCR Q1,IF=10.6
)期刊上发表了一种利用管状结构拓扑信息进行3D/2D配准的方法“3D/2D Vessel Registration based on Monte Carlo Tree Search and Manifold Regularization”. DOI: 10.1109/TMI.2023.3347896。
(https://ieeexplore.ieee.org/document/10375552). 以下是该文章的介绍:
本研究提出了一种能够自动实现刚性和非刚性配准的高精度血管3D/2D配准方法。基于之前的工作,作者通过蒙特卡洛树搜索(MCTS)进行3D/2D配准来实现刚性配准。基于血管拓扑结构,可以将血管匹配分解为连续的状态,并进一步构建为树状结构。搜索树的每个节点记录当前的3D/2D血管匹配状态,以及相应的配准结果和评分。MCTS策略被应用于检测得分最高的最优匹配状态。对于非刚性配准,需要在3D和2D血管之间建立密集的对应关系。因此,基于刚性配准结果的血管匹配,作者提出了一种基于流形正则化的血管变形模型,该模型在血管拓扑上强制使变形场平滑。它利用血管结构的内在拓扑来构建目标函数的流形正则化项。团队在临床肝动脉、冠状动脉和主动脉数据集上验证了算法的准确性和效率;所提出的变形模型只利用了3D空间中变形场的平滑性和拓扑结构,因此它可以推广到任意3D到2D的拓扑数据跨维度配准。
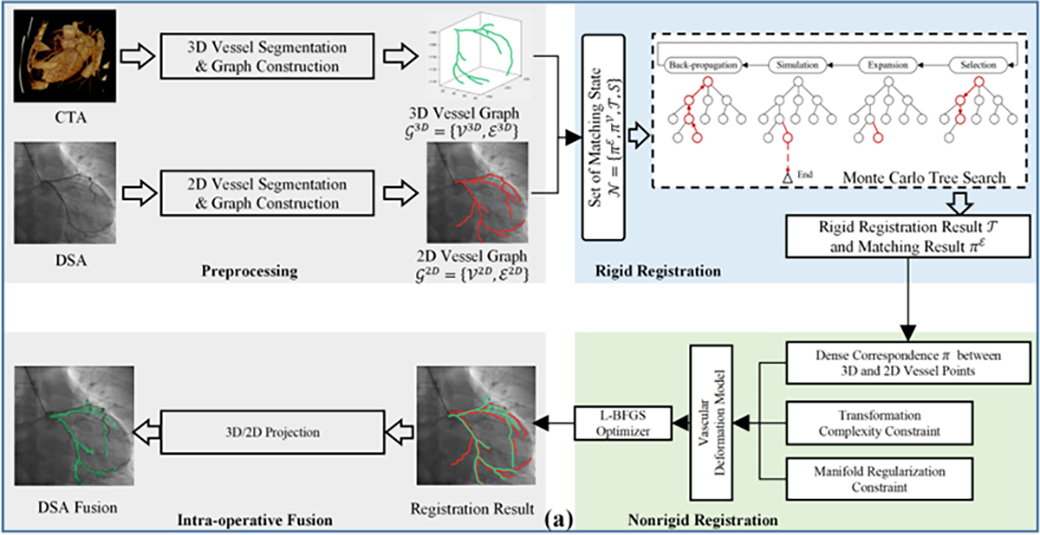
工作流程包含4个连续的步骤
在实验部分,作者对提出算法进行了全面的数据测试,包括使用人造缺陷(噪声、形变)的模拟血管数据对算法进行鲁棒性测试,使用分割算法计算生成的血管中心线对算法进行鲁棒性测试,使用人工标注的临床肝动脉、主动脉和冠脉数据进行配准测试。定量的及定性的实验展示了本文提出的方法的优秀性能。

(算法在人造缺陷的模拟血管数据的配准实验结果)
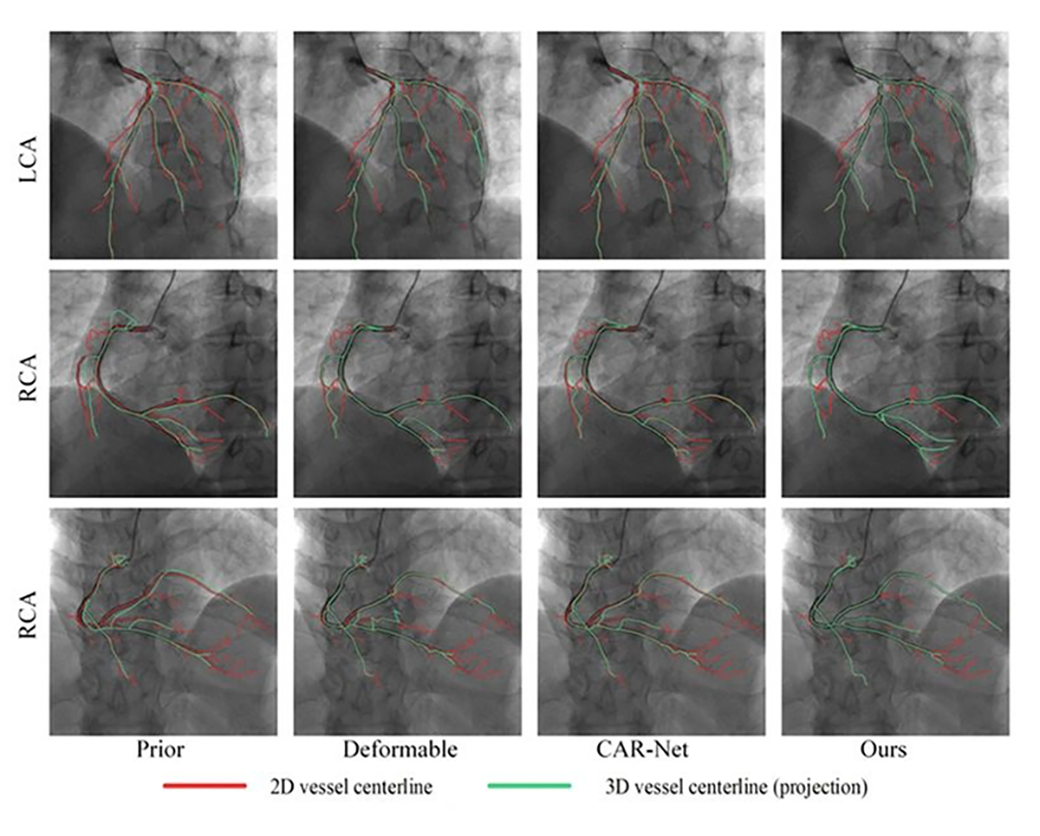
(算法在自动分割的LCA和RCA中心线数据的配准实验结果演示)
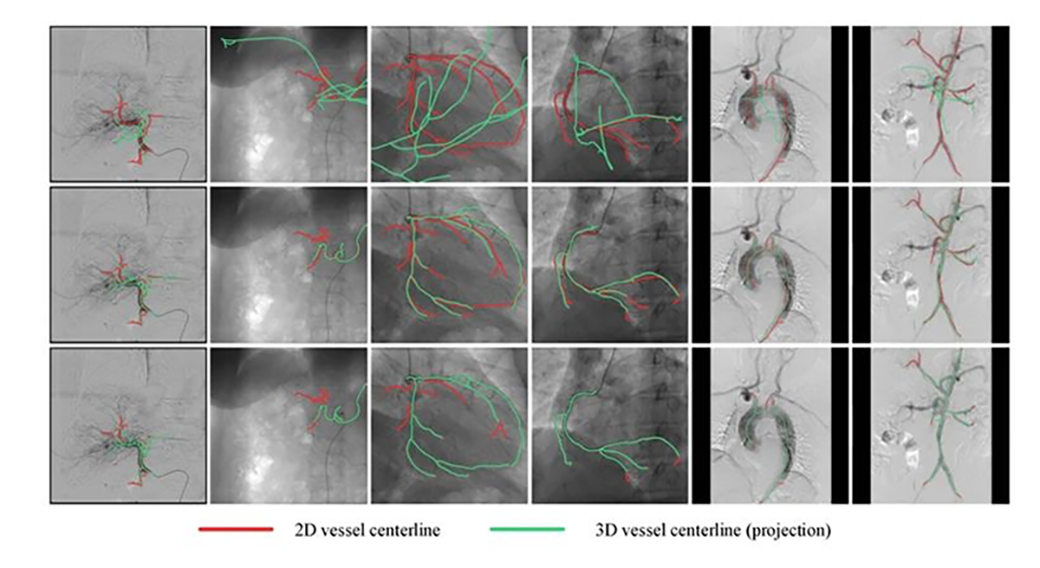
(算法在人工标注的肝动脉、冠状动脉和主动脉配准结果演示)
本方法是实现血管介入手术器械空间定位和导航的关键技术,可以将术中实时DSA图像的导丝导管等器械映射到术前3D血管空间。横乐科技与东南大学附属中大医院、东南大学仪器科学与工程学院合作开展新一代血管介入机器人系统平台研制,包括覆盖多个介入过程的器械搭载和控制从端和沉浸式智能遥操作主端平台,同时对血管介入机器人的力反馈力传感、医学影像人工智能大模型、机器人智能控制、手术机器人底层操作系统等关键技术进行研究,项目获得中国博士后科学基金(2021M700772)资助。

手术室外的实验场景(outside OR)
