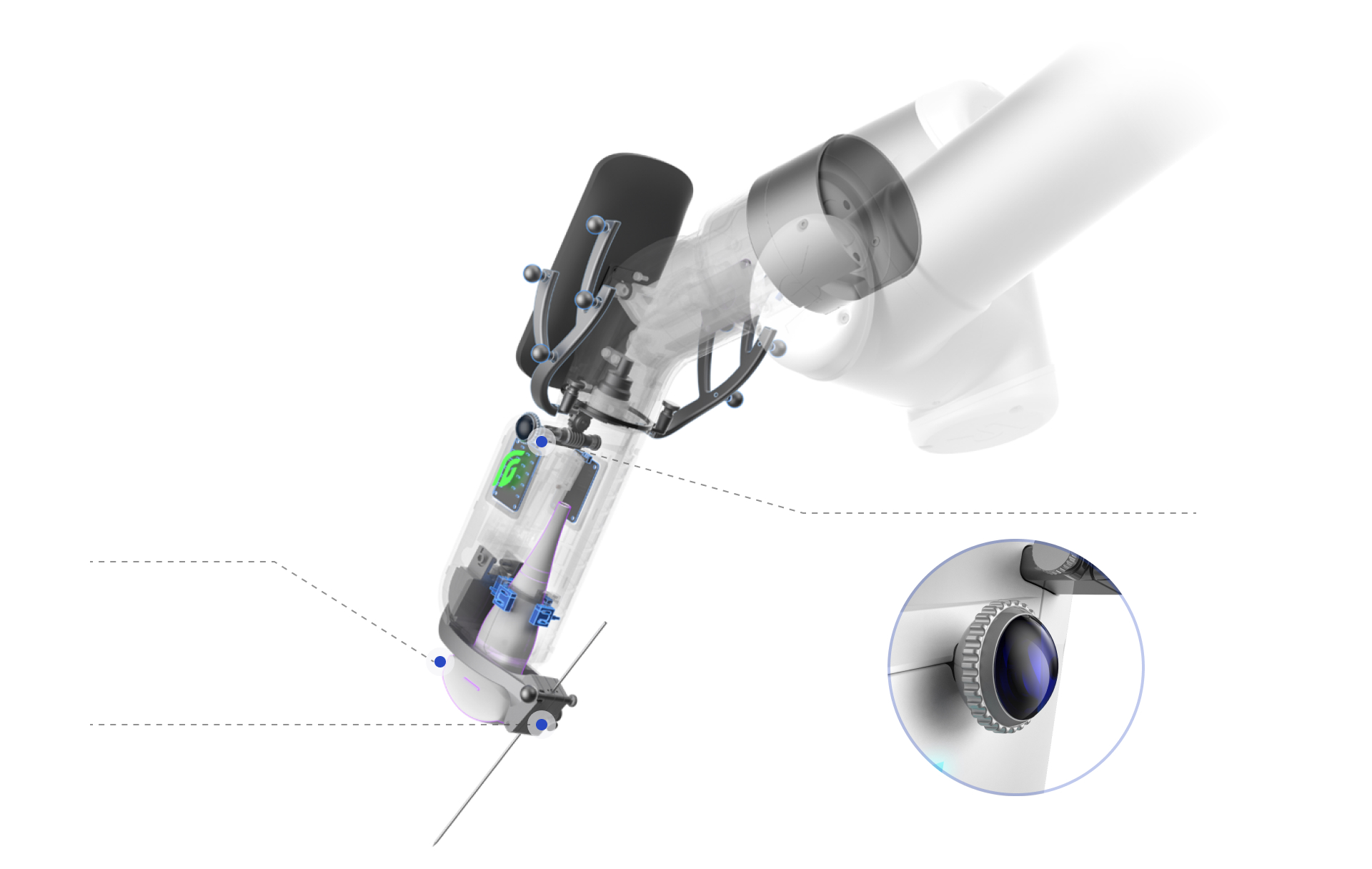
SIEM
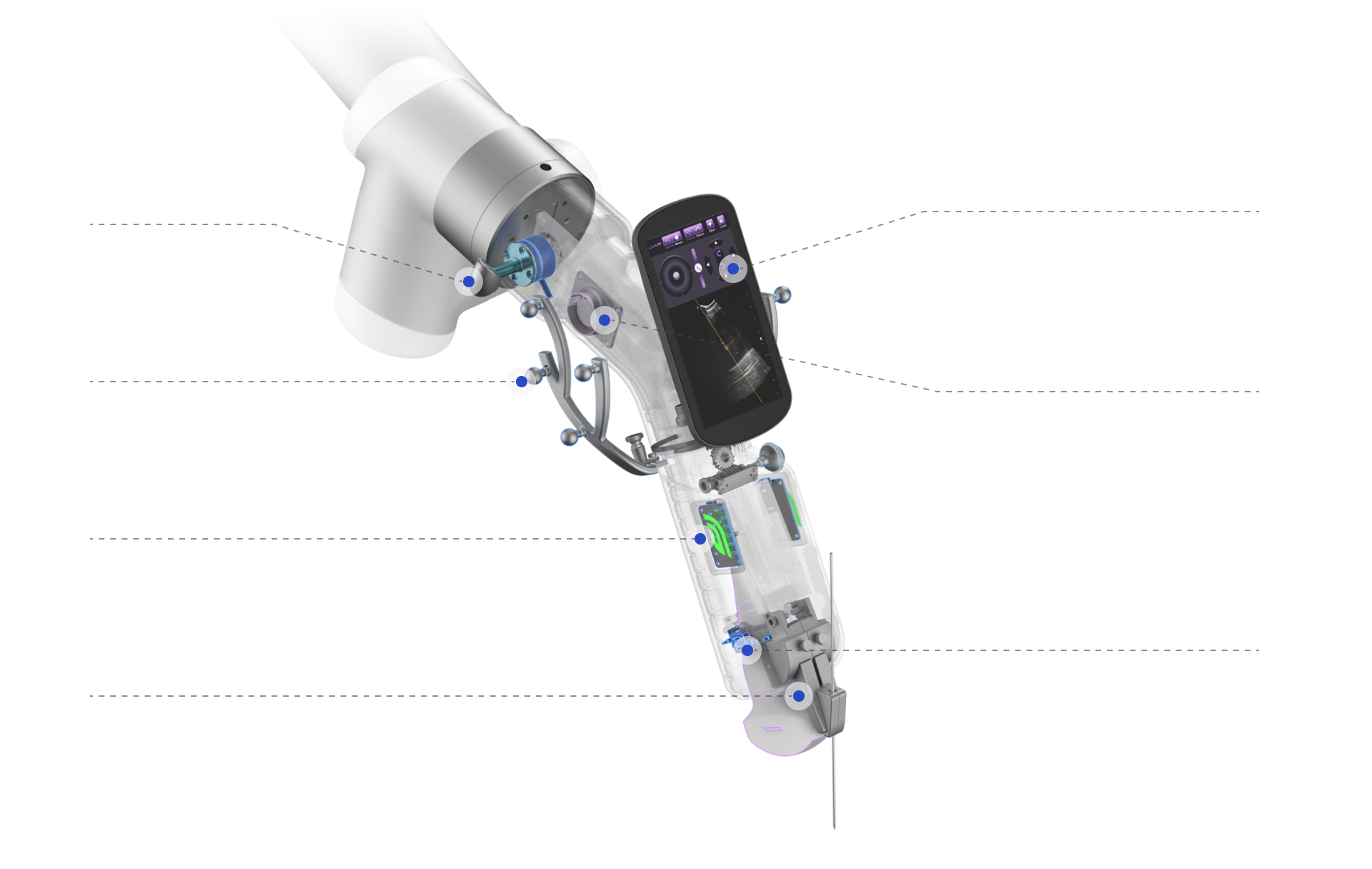
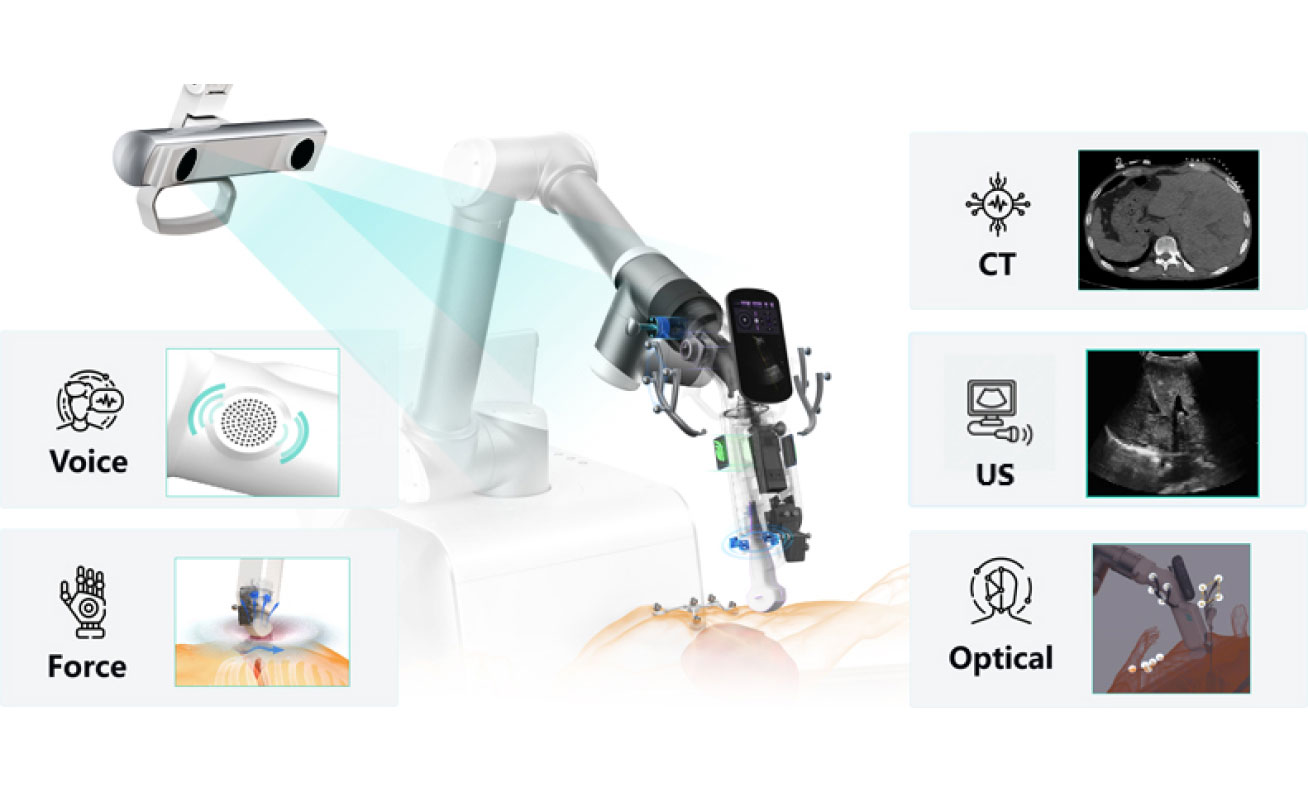
SIEM serves as the execution component for surgical planning in the SGNIO, functioning as the "hand" of the system. It comprises a robotic arm and an end-effector module. The end-effector module, designed by Hanglok, integrates force sensing, optical sensing, an ultrasound system, and a needle insertion channel. As the only component in direct contact with the patient, it performs tasks such as aligning the ultrasound probe, positioning the needle path, and fine-tuning the surgical plan during the procedure.















 multi-loop feedback
multi-loop feedback
 interactive perception
interactive perception
 humanoid intelligence
humanoid intelligence